Instalacja MicroPython na ESP32-CAM – szybki przewodnik
Co to jest ESP32-CAM?

ESP32-CAM to kompaktowy moduł oparty na popularnym układzie ESP32 (Espressif), wyposażony w kamerę OV2640. Dzięki wbudowanemu Wi‑Fi i Bluetooth umożliwia bezprzewodowe przesyłanie obrazu oraz zdalne sterowanie. Moduł pozwala na nagrywanie zdjęć i strumieniowanie wideo w jakości do 2 MP, zużywając przy tym niewiele energii. To doskonały wybór do projektów IoT, monitoringu czy robotyki, zarówno dla hobbystów, jak i twórców prototypów komercyjnych.
Dlaczego MicroPython?
MicroPython to lekka implementacja Pythona zoptymalizowana pod kątem mikrokontrolerów, w tym ESP32-CAM. Oferuje:
- Czytelną składnię: znasz Pythona – ruszasz od razu.
- Interaktywny REPL: szybkie testy „na żywo” bez konieczności kompilowania.
- Gotowe biblioteki: obsługa GPIO, Wi‑Fi, systemu plików czy karty SD minimalnym nakładem kodu.
- Aktywną społeczność: liczne przykłady i wsparcie online.
Dzięki temu proces tworzenia i debugowania przebiega sprawniej, a skomplikowane zadania implementujesz kilkoma linijkami.
Przygotowanie środowiska
Zanim wgrasz MicroPython na ESP32-CAM, musisz przygotować środowisko programistyczne na swoim komputerze. Oto kroki:
- Sterowniki USB-TTL – jeśli Twój moduł nie jest od razu rozpoznawany, zainstaluj sterowniki CH340/CP210x (dostępne na stronie producenta układu).
- Python 3.x – pobierz i zainstaluj najnowszą wersję Pythona ze strony python.org, upewniając się, że zaznaczyłeś opcję dodania do PATH.
- esptool.py – w terminalu (CMD/PowerShell lub konsoli Linux/macOS) wpisz:
pip install esptoolTo narzędzie pozwala na wgrywanie firmware’u do pamięci modułu.
Instalacja firmware’u
Po przygotowaniu środowiska czas na wgranie MicroPython na ESP32-CAM.
Oficjalne Micropython nie obsługuje kamery OV2640 „out-of-the-box”, więc skorzystamy z firmware’a przygotowanego przez Mauro “lemariva”:
- Wejdź na repozytorium: https://github.com/lemariva/micropython-camera-driver
- W katalogu
firmware/znajdziesz plik binarny, np.micropython_camera_feeeb5ea3_esp32_idf4_4.bin
Pobierz go do katalogu na swoim dysku.
W terminalu, w folderze z pobranym firmware, wykonaj:
# 1) wyczyść pamięć flash
esptool.py --chip esp32 --port /dev/ttyUSB0 erase_flash
# 2) wgraj firmware pod adresem 0x1000
esptool.py --chip esp32 --port /dev/ttyUSB0 write_flash -z 0x1000 micropython_camera_feeeb5ea3_esp32_idf4_4.binPołączenie
Jeśli używasz płytki ESP32-CAM-MB, wbudowane rezystory mogą uniemożliwić poprawny test. Do komunikacji najlepiej użyć zewnętrznego konwertera USB–UART
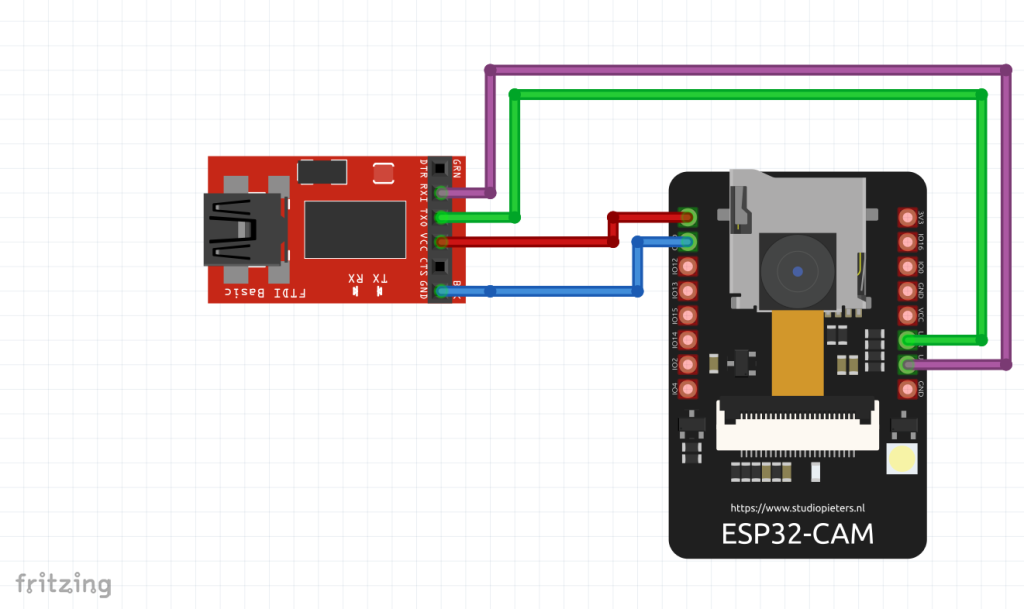
1. Adapter USB-UART
Podłączenie adaptera do modułu ESP32-CAM. Potrzebujemy podłączyć tylko 4 linie. W tym celu wykorzystamy przewody do prototypowania
- TX adaptera → RX modułu
- RX adaptera → TX modułu
- GND → GND
- 5V → 5V
2. ESP32-CAM-MB jako konwerter USB-UART
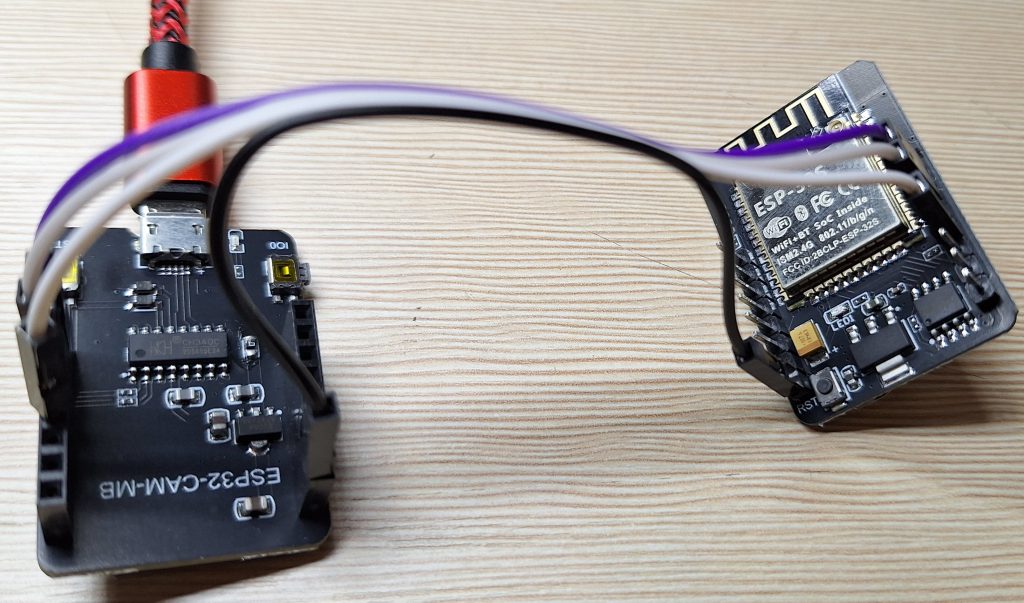
Ale skoro mamy już moduł ESP32-CAM-MB to jego możemy wykorzystać jako adapter USB-UART. Połączenia wymagają piny:
5V, GND, RxD oraz TxD.
Łączymy je z odpowiadającymi im pinami w płytce ESP32-CAM-MB
REPL
REPL (Read-Eval-Print Loop) w MicroPythonie na ESP32 to interaktywny interpretator, dzięki któremu można w czasie rzeczywistym wywoływać polecenia MicoPythona.
- Otwórz terminal, np.:
picocom /dev/ttyUSB0 -b115200 - Powinien wyświetlić się prompt podobny do tego:
MicroPython v1.x.x on 2025-…; ESP32 module with ESP32
Type "help()" for more information.
>>> - Jeśli prompt się nie pojawia, naciśnij przycisk RESET na płytce.

Podsumowanie i dalsze kroki
Gratulacje! Udało Ci się wgrać MicroPython na ESP32-CAM i nawiązać z nim połączenie.
Teraz możesz:
- Strumieniować obraz do przeglądarki lub aplikacji mobilnej.
- Zapis zdjęć na karcie SD i analizować je w MicroPythonie.
- Eksperymentować z detekcją ruchu czy rozpoznawaniem obiektów.
Jeśli szukasz inspiracji, zajrzyj do dokumentacji MicroPython (https://docs.micropython.org/) oraz społeczności na GitHubie. Powodzenia w dalszych projektach!
Polecam nasze produkty:

